



Ce driver basé sur le circuit TB6612FNG permet de contrôler deux moteurs CC jusqu'à 1 A ou un moteur pas-à-pas bipolaire à partir d'une sortie PWM d'un microcontrôleur.
 Paiement sécurisé
Paiement sécurisé Connexion SSL et possibilité de régler par Paypal
 Livraison rapide
Livraison rapide Livraison offerte dès 100€ d'achat
 Support premium
Support premium Une question? On vous répond par mail et téléphone
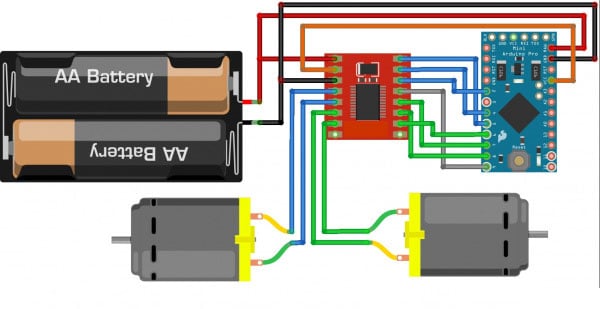
Ce driver basé sur le circuit TB6612FNG permet de contrôler deux moteurs CC jusqu'à 1 A ou un moteur pas-à-pas bipolaire à partir d'une sortie PWM d'un microcontrôleur (Arduino, Seeeduino, etc). Chaque canal dispose de 2 broches de commande de direction et d'une broche de commande de vitesse. Les sorties moteurs peuvent être mises en parallèle pour alimenter un moteur avec 2 A.
Remarques:
- ce module n'est pas protégé contre les inversions de polarité.
- le module est livré avec des connecteurs à souder soi-même en fonction de l'utilisation.
- un échauffement important du circuit intégré est possible et normal en fonctionnement
Alimentation:
- partie logique: 2,7 à 5,5 Vcc
- partie moteur: 4,5 à 13,5 Vcc
Fréquence PWM: 100 kHz maxi
Sortie: 1 A par canal (3 A en pointe)
Dimensions: 21 x 15 x 3 mm
#define PIN_PWMA 8 #define PIN_AIN2 7 #define PIN_AIN1 6 #define PIN_STBY 5 #define PIN_POT A0 int pos = 0; int val; void setup() { Serial.begin(57600); pinMode(PIN_PWMA,OUTPUT); pinMode(PIN_AIN2,OUTPUT); pinMode(PIN_AIN1,OUTPUT); pinMode(PIN_STBY,OUTPUT); } void loop() { val = analogRead(PIN_POT); pos = map(val, 0, 1023, 0, 255); Serial.print("Potentiometre : "); Serial.println(pos); analogWrite(PIN_PWMA,pos); digitalWrite(PIN_STBY,HIGH); //rotation dans un sens digitalWrite(PIN_AIN1,HIGH); digitalWrite(PIN_AIN2,LOW); delay(3000); Serial.println("ShortBrake"); digitalWrite(PIN_AIN1,HIGH); digitalWrite(PIN_AIN2,HIGH); delay(3000); //rotation dans l'autre sens digitalWrite(PIN_AIN1,LOW); digitalWrite(PIN_AIN2,HIGH); delay(3000); Serial.println("Stop"); digitalWrite(PIN_AIN1,LOW); digitalWrite(PIN_AIN2,LOW); delay(3000); } 

