Basé sur des L293D
 Paiement sécurisé
Paiement sécurisé Connexion SSL et possibilité de régler par Paypal
 Livraison rapide
Livraison rapide Livraison offerte dès 100€ d'achat
 Support premium
Support premium Une question? On vous répond par mail et téléphone
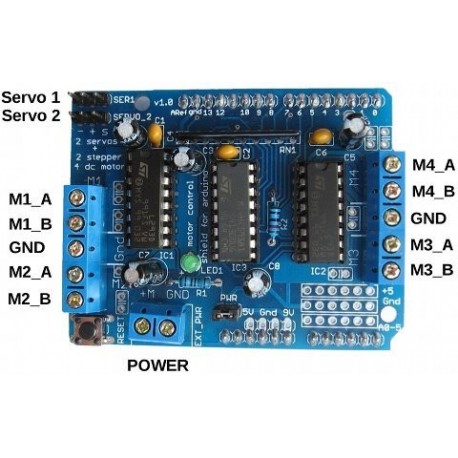
Ce shield est basé sur le circuit intégré L293D. Ce circuit est un double demi pont en H. Il permet de commander 4 moteurs DC en simultané. Le shield est utilisable pour des moteurs / alimentations aux tensions inférieur à 36Vdc et 600mA par voie.
Permet la commande de 4 moteurs DC ou 2 moteurs pas-à-pas ou 2 servo moteurs
// Test 4 moteurs avec le Shield L293D & la librairie "AFMotor.h
// -------------------------------------------------------------
#include <AFMotor.h>
AF_DCMotor motor1(1);
AF_DCMotor motor2(2);
AF_DCMotor motor3(3);
AF_DCMotor motor4(4);
void setup()
{
}
void loop()
{
// Vitesse des 4 moteurs (0 à 255)
//--------------------------------
motor1.setSpeed(240);
motor2.setSpeed(240);
motor3.setSpeed(240);
motor4.setSpeed(240);
// Marche avant des 4 moteurs pendant 2 secondes
// ---------------------------------------------
motor1.run(FORWARD);
motor2.run(FORWARD);
motor3.run(FORWARD);
motor4.run(FORWARD);
delay(2000);
// Arrêt des 4 moteurs pendant 1 seconde
// -------------------------------------
motor1.run(RELEASE);
motor2.run(RELEASE);
motor3.run(RELEASE);
motor4.run(RELEASE);
delay(1000);
// Marche arrière des 4 moteurs pendant 2 secondes
// -----------------------------------------------
motor1.run(BACKWARD);
motor2.run(BACKWARD);
motor3.run(BACKWARD);
motor4.run(BACKWARD);
delay(2000);
// Arrêt des 4 moteurs pendant 1 seconde
// -------------------------------------
motor1.run(RELEASE);
motor2.run(RELEASE);
motor3.run(RELEASE);
motor4.run(RELEASE);
delay(100);
}